题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
系统如图9-2所示,其中α1、α2、α3为状态反馈系数。 (1)写出对象的状态方程。 (2)若要求闭环系统的
系统如图9-2所示,其中α1、α2、α3为状态反馈系数。
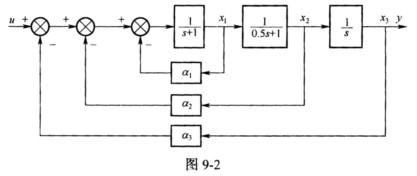 (1)写出对象的状态方程。 (2)若要求闭环系统的极点为-1、-2、-3、求α1、α2、α3。
(1)写出对象的状态方程。 (2)若要求闭环系统的极点为-1、-2、-3、求α1、α2、α3。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
系统如图9-2所示,其中α1、α2、α3为状态反馈系数。
(1)写出对象的状态方程。 (2)若要求闭环系统的极点为-1、-2、-3、求α1、α2、α3。
答案
 更多“系统如图9-2所示,其中α1、α2、α3为状态反馈系数。 (1)写出对象的状态方程。 (2)若要求闭环系统的”相关的问题
更多“系统如图9-2所示,其中α1、α2、α3为状态反馈系数。 (1)写出对象的状态方程。 (2)若要求闭环系统的”相关的问题
第1题
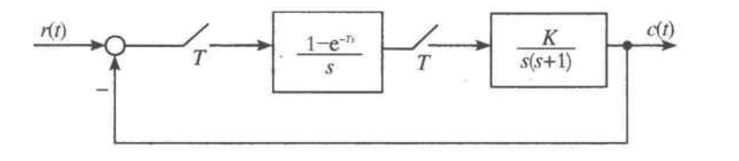
已知采样系统如图7-16所示,其中T=1s,K=1,
试求:
(1)闭环脉冲传递函数。
(2)判断系统是否稳定。
(3)写出描述系统教学模型的差分方程。
第2题
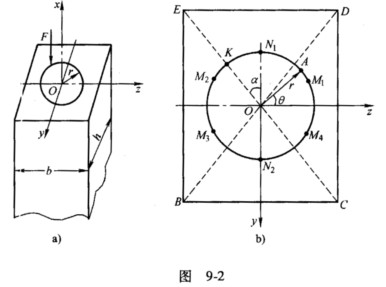
如图9-2所示,一矩形截面铸铁柱承受偏心压力F的作用。F力作用点可以在柱顶面上以形心O点为圆心、r为半径的圆周上移动。柱的承载能力由其抗拉强度控制。已知b=150mm,h=200mm,r=80mm;材料的许用拉应力[σt]=30MPa。(1)当,力作用在K点时,求柱的许用载荷[F];(2)问当F力作用在圆周何处时,柱的许用载荷最小?并求出[F]min;(3)问当F力作用在圆周何处时,柱的许用载荷最大?并求出[F]max。
第3题
设一个复值带通模拟信号xa(t)的频谱如图题1-15所示,其中△Ωc=Ω2-Ω1,对该信号进行采样,得到采样序列 。
。

(1)当 ,画出采样序列
,画出采样序列 的傅里叶变换
的傅里叶变换 。
。
(2)求不发生混叠失真的最低采样频率。
(3)如果采样频率大于或等于由(2)确定的采样率,试画出由 恢复xa(t)的系统框图。假设有(复数的)理想滤波器可以使用。
恢复xa(t)的系统框图。假设有(复数的)理想滤波器可以使用。
第4题
第5题
某连续时间实的因果LTI系统的零、极点如图4-69所示,并己知.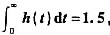 其中h(t)为该系统的单位冲激响应.试求:
其中h(t)为该系统的单位冲激响应.试求:
(1)它是什么类型的系统(全通或最小相移系统),并求h(t)(应为实函数);
(2)写出它的线性实系数微分方程表示;
(3)它的逆系统的单位冲激响应h1(t),该逆系统是可以实现的(即既因果又稳定)的吗?

第6题
某随动系统,忽略小时间常数,采用并联校正,其简化的结构图如图5所示,其中

1)求出Wc(s)传递函数的形式与参数。
2)求出满足该指标的Kobj值。
3)画出用并联校正时的系统对数幅频特性。
第7题
如图9-2所示,已知 vA=ω1·O1A,方向如图;vD垂直于O2D。于是可确定速度瞬心C的位置,求得:
这样做对吗?为什么?

第8题
如图9-2所示,圆柱A缠以细绳,绳的B端固定在天花板上。圆柱自静止落下,其轴心的速度为 ,其中g为常量,h为圆柱轴心到初始位置的距离。如圆柱半径为r,求圆柱的平面运动方程。
,其中g为常量,h为圆柱轴心到初始位置的距离。如圆柱半径为r,求圆柱的平面运动方程。
第9题
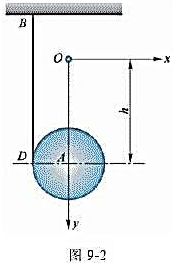
货车车轴两端承受的载荷F=100kN,材料为碳素钢,材料的σb=500MPa,σ-1=200MPa,车轴结构如图9-2所示,规定安全系数[n]=1.5,试校核A-A、B-B截面的疲劳强度。
第10题
系统如图9-10所示,其中u和y为标量,状态观测器方程为:
 (1)建立闭环系统的状态模型。 (2)求闭环系统的传递函数
(1)建立闭环系统的状态模型。 (2)求闭环系统的传递函数
 。
。