题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
机器人力雅可比矩阵和速度雅可比举证不是转置关系。()
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“机器人力雅可比矩阵和速度雅可比举证不是转置关系。()”相关的问题
更多“机器人力雅可比矩阵和速度雅可比举证不是转置关系。()”相关的问题
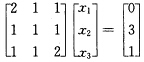
第2题
给定方程组

(1)写出雅可比迭代格式和高斯赛德尔迭代格式;
(2)证明雅可比迭代法发散而高斯-赛德尔迭代法收敛

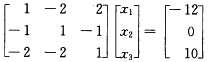
第3题
给定方程组

(1)写出雅可比迭代格式和高斯-赛德尔迭代格式。
(2)证明雅可比迭代法收敛而高斯赛德尔选代法发散。

第4题
给定方程组
 (1)写出雅可比迭代格式和高斯一赛德尔迭代格式; (2)证明雅可比迭代法发散而高斯一赛德尔迭代法收敛; (3)取x(0)=(0,0,0)T,用迭代法求出该方程组的解,精确到
(1)写出雅可比迭代格式和高斯一赛德尔迭代格式; (2)证明雅可比迭代法发散而高斯一赛德尔迭代法收敛; (3)取x(0)=(0,0,0)T,用迭代法求出该方程组的解,精确到

第5题
给定方程组
 (1)写出雅可比迭代格式和高斯一赛德尔迭代格式。 (2)证明雅可比迭代法收敛而高斯一赛德尔迭代法发散。 (3)取x(0)=(0,0,0)T,用迭代法求出该方程组的解,精确到
(1)写出雅可比迭代格式和高斯一赛德尔迭代格式。 (2)证明雅可比迭代法收敛而高斯一赛德尔迭代法发散。 (3)取x(0)=(0,0,0)T,用迭代法求出该方程组的解,精确到

第7题
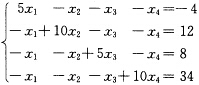
分别用雅可比迭代和GS迭代求解下述线性方程组:
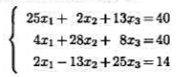
取初值x(0)=(0,0,0)T,精确到小数点后四位,并在理论上判断这两个迭代格式的收敛性。
第8题
证明在一般的曲线坐标系(q1,q2,q3)中,体积元素为
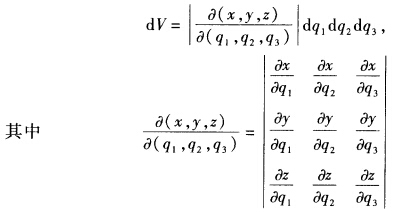 叫做函数行列式或雅可比(Jacobi)行列式.
叫做函数行列式或雅可比(Jacobi)行列式.
 考查雅可比迭代格式和高斯一赛德尔迭代格式的收敛性。
考查雅可比迭代格式和高斯一赛德尔迭代格式的收敛性。