题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
控制系统处于静态时,被调参数保持为一常数。()
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“控制系统处于静态时,被调参数保持为一常数。()”相关的问题
更多“控制系统处于静态时,被调参数保持为一常数。()”相关的问题
第3题
(中国科学院一中国科学技术大学2003年硕士研究生入学考试试题)控制系统方块图如图3-43所示。
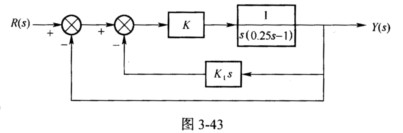 (1)确定使闭环系统稳定的参数KKt的取值范围。 (2)若要求:①系统的最大超调量为10%;②调整时间为1.5秒(对于5%的误差范围)。 试确定参数K和Kt的值。
(1)确定使闭环系统稳定的参数KKt的取值范围。 (2)若要求:①系统的最大超调量为10%;②调整时间为1.5秒(对于5%的误差范围)。 试确定参数K和Kt的值。
第6题
A.铺设菱形交叉时,必须正确找出辙叉理论交点,横向对齐铺设,保持长轴与短轴相互垂直,无先天病害
B.加强日常养护维修,保持几何尺寸经常处于良好状态。有条件时,可垫辙叉下大胶垫,安设分开式扣件。增加道床弹性,减少辙叉磨耗和伤损,达到伤损程度的应及时更换
C.注意静态检查和动态观察,发现短轨方向不良,撞击辙叉叉尖时,用菱形交叉爬行简易测量法,检测钝角辙叉的爬行方向,确定整治爬行方案,彻底整治
D.对辙叉槽宽为48mm不合标准的旧钝角辙叉,应迅速进行技术改造。在未改造前,应将辙叉槽调整到最小限度,轨距尽量加大,保证1391mm尺寸
第8题
设总体X服从参数为λ(λ>0)的指数分布,X1,X2,…,Xn为一随机样本,令Y=min(X1,X2,…,Xn),问常数C为何值时,才能使CY是λ的无偏估计
第9题
已知控制系统结构如图3-54所示。
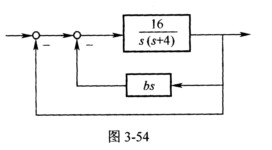 (1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比为0.8时的速度反馈常数b的值,并确定在单位阶跃输入下系统的最大超调量和单位斜坡输入所引起的稳态误差。 (3)怎样使(2)的阻尼比保持0.8不变而使其稳态误差等于(1)的稳态误差值。
(1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比为0.8时的速度反馈常数b的值,并确定在单位阶跃输入下系统的最大超调量和单位斜坡输入所引起的稳态误差。 (3)怎样使(2)的阻尼比保持0.8不变而使其稳态误差等于(1)的稳态误差值。